Posted by: Britt on 01/03/24
In recent years we at Hankamp have done a lot of research into the usefulness of exoskeletons for our employees. Low back pain is an issue in our opinion that often receives too little attention.
As Hankamp we have been involved in the research projects Sophia and within project wearable robotics.
Recently a scientific article was published with the differences between some already available exoskeletons that might be interesting to read.
Should you have any questions here please let us know.
benchmarking-commercially-available-soft-and-rigid-passive-back-exoskeletons-for-an-industrial-workplace
Posted by: Britt on 28/02/24
Sorry, this entry is only available in Dutch.
Posted by: Britt on 24/01/23
Sophia Project
In December 2019, the European research project Sophia was launched, aiming to improve the social and physical interaction skills of human-robot systems in manufacturing environments. The entire projects is aimed at the research question: “How can human-robot cooperation be improved?”.
Hankamp Gears is one of three partner companies within this research project that serves as a reference and test environment suitable to test and improve the developed technology in real life. Besides the partner companies Hankamp, VW and Hidri also research institutes among which IIT, the University of Twente, IMK and DIN are involved.
Before the Sophia project started, Hankamp, used robots and production automation solutions to support its production. Typically, these solutions are put behind a large and secure fence to prevent humans from entering the robot’s work area. In this situation at its best, there is a human robot interaction through one or more control panels/screens and the human feeding the products through a secure pass through. These operations are quite static, just like the interface between the robot and the machine. Because each machine manufacturer defines its own signals, this means that a separate connection must be established for each machine. This comes with the necessary costs which often limit an automation to two or three different machines if your lucky. As a result, a robot is often doomed to remain in one place for the rest of its life, performing the same trick. This situation also occurs at Hankamp.
Can Hankamp Gears use automation more flexibly?
Within the Sophia project, making robotic solutions more user-friendly is one of the objectives. Through the Sophia project, Hankamp was introduced to mobile cobot solutions like the Robotnik Kairos. The Robotnik Kairos is a self-driving vehicle on which a Universal Robot 16e is mounted. Things like Lidar and omnidirectional mecanum wheels should allow the robot to maneuver safely through its environment. On paper and in reality, a system that offers many possibilities but only for those who master the Linux-based Robot Operating System (ROS). So we have a very flexible and safe system that can drive anywhere, but it is actually so far ahead of its time that the average SME cannot use it because it lacks the knowledge. At that time Hankamp didn’t know an purchased a Robotnik Kairos + UR16e with the idea of loading and unloading machines with a long cycle time. Because it was a relatively new concept we first had to spend the necessary time to get to know ROS as well as making the necessary updates to make the system suitable for our situation. When putting this system into operation, we quickly ran into certain limitations:
- For example, the floor must be free of obstacles lower than 30cm otherwise they will be overlooked by the safety lidars;
- A robot arm that can lift 16 kg, but with a reach which is too narrow too unload the machine;
- The self-driving vehicle and the UR16e are connected by the overarching ROS which requires the necessary knowledge of Linux and ROS.
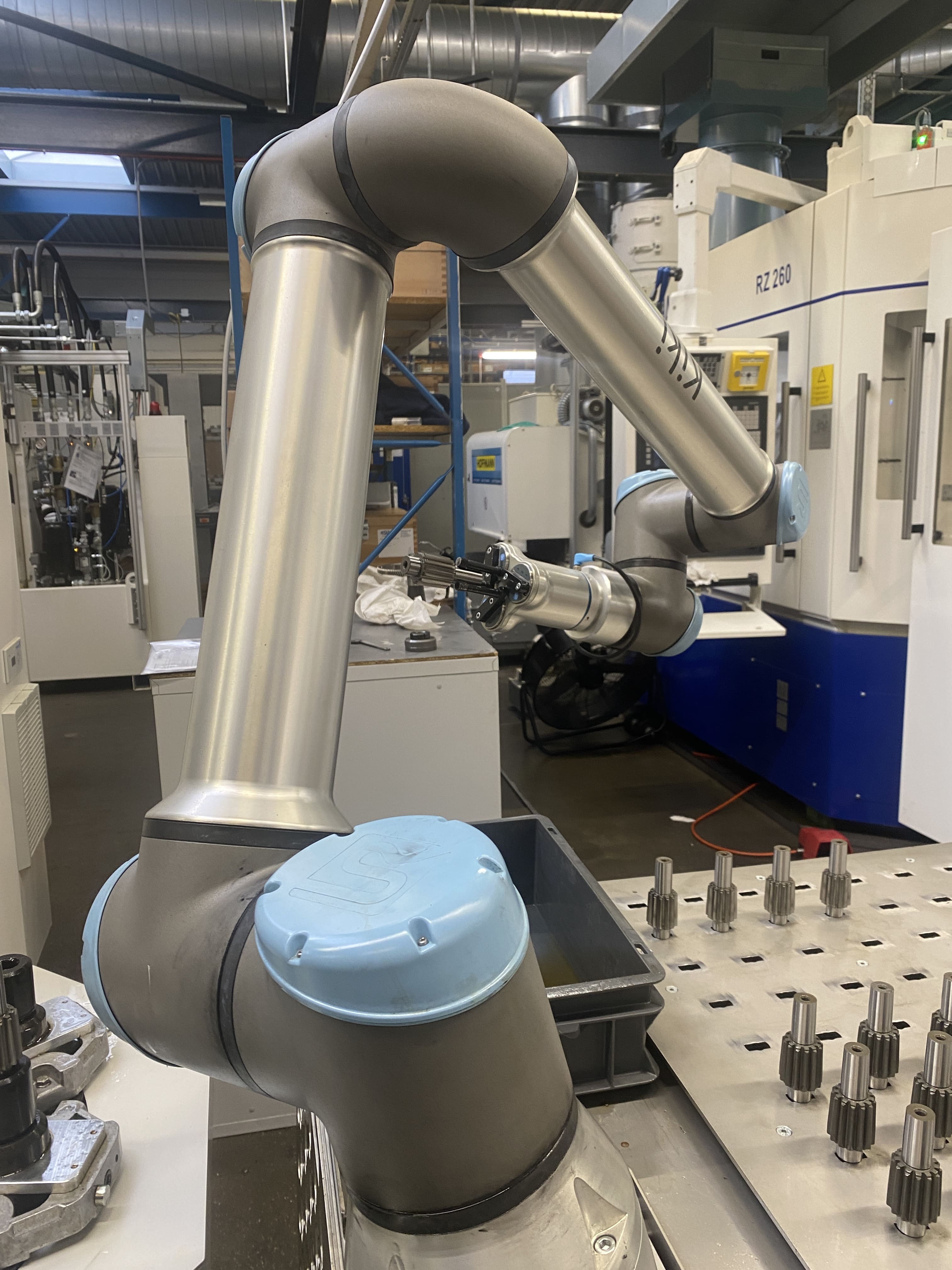
Besides the mobile solutions like the Robotnik Kairos, also standalone cobots are offered. Given the positive experience with the operating system (Polyscope) from Universal robots, the price and the availability of different grippers, Hankamp Gears also purchased a cobot solution this time with more requirements in mind. Ensuring that work reach and maximum weight to be lifted are more in balance, we have a gripper that also fits the products we want to process in terms of lifting weight. We designed a neat looking table that is more fitted to the gears we make and as the icing on the cake, the ability to use a pallet truck to pick up the entire table and place it next to another machine. In the beginning we had to fix bugs in the in house written program, stabilizing the process and before you know it you are 1 year further, but with the second cobot it was just copy/paste and it works.
Advantages:
- Expansion of production capacity with a number of extra unmanned hours during the night:
- Processing products from Ø10mm to Ø200mm with minimal adjustments;
- Moveable with a pallet truck;
- Operators quickly understand how to operate the system;
- The design can be copied 1 on 1 to other machines;
- A cobot can do without fencing under certain conditions.
Disadvantages
- The longer a cobot is used in 1 place, the more the operator attentiveness reduces;
- How safe is safe when a cobot is partially placed in the aisle due to lack of space, as partner in the Sophia project DIN also participates in how to improve directives on cobot safety;
- A user-friendly system does not work without involving the end-user;
- Cobots may have a low initial purchase price, but often there are still sufficient costs to be incurred to get the system up and running. This raises the question whether a traditional automation solution is not just as favorable from a price point of view.
Currently the system works so well that the first cobot table is used full time at 1 machine and probably will not leave its place for the rest of its life. And so a flexible solution has unintentionally become static again….



Posted by: Britt on 04/05/22
Sorry, this entry is only available in Dutch.
Posted by: Britt on 20/09/18
Sorry, this entry is only available in Dutch.
Posted by: Britt on 29/06/18
Sorry, this entry is only available in Dutch.
Posted by: Danielle ten Bokum on 12/04/17
Sorry, this entry is only available in Dutch.
Posted by: Danielle ten Bokum on 22/08/16
Last week our latest machine is deliverd.
The Mazak Integrex J200.
The machine is equipped with, the following options;
- Changer with 36 tools
- Weighted main engine (15 kw)
- Several software options, for instance gear hobbing.
The machine will usually be used for the production of small series. Due to the various options, we are able to build more rapidly.
This is the 10th Mazak machine at Hankamp Gears.

Posted by: Danielle ten Bokum on 07/07/16
Sorry, this entry is only available in Dutch.
Posted by: Freek Tönis on 02/04/15
In 2015 Hankamp already invested in several new machinery, for instance;

- Kasto material cutting machine, with this machine we are able to cut material with a diameter of 400 mm (already delivered).
- Okamoto surface grinding machine (already delivered).
- Mazak I500, 5 axis milling machine for mainly our aircraft customers.
- Mazak Megaturn 500, vertical turning lathe able to manufacture parts up to 500 mm.